ASTM E143 describes the method for static torsion testing of structural materials to determine the shear modulus (or modulus of rigidity) within the linear elastic range below the proportional limit. A critical “Measurement Gap” exists due to axial constraint and alignment errors: if the clamping heads restrict axial movement or become even slightly non-coaxial, parasitic bending moments or induced tensile loads develop that drastically distort the uniform state of twist. Furthermore, because structural shear displacement prior to yielding is incredibly minute, standard machine rotation measurements capture the systemic “wind-up” and compliance of the fixtures and drive train rather than the actual deformation of the material coupon, resulting in false, artificially low modulus readings.
To meet the requirements of ASTM E143, MTO recommends the TestResources 160 Series torsion testing frame integrated with Newton Characterization™ architecture.
Primary Metric: This method operates under controlled torque or angular displacement mode, loading the specimen incrementally or continuously to generate a precise shear stress-versus-shear strain curve.
Specimen Geometry: Tests are executed on metallic or non-metallic structural coupons prepared in uniform solid circular bar or hollow tubular geometries. The testing specimens must be sound and free from surface imperfections, nicks, or scratches, as maximum shear stress localizes entirely on the outer diameter of the specimen.
Critical Ratios: The system must maintain strict concentricity between the loading centers. To satisfy the standard, one gripping chuck must remain completely free to slide axially during the twist cycle, preventing unwanted axial stresses from accumulating as the specimen geometry deforms.
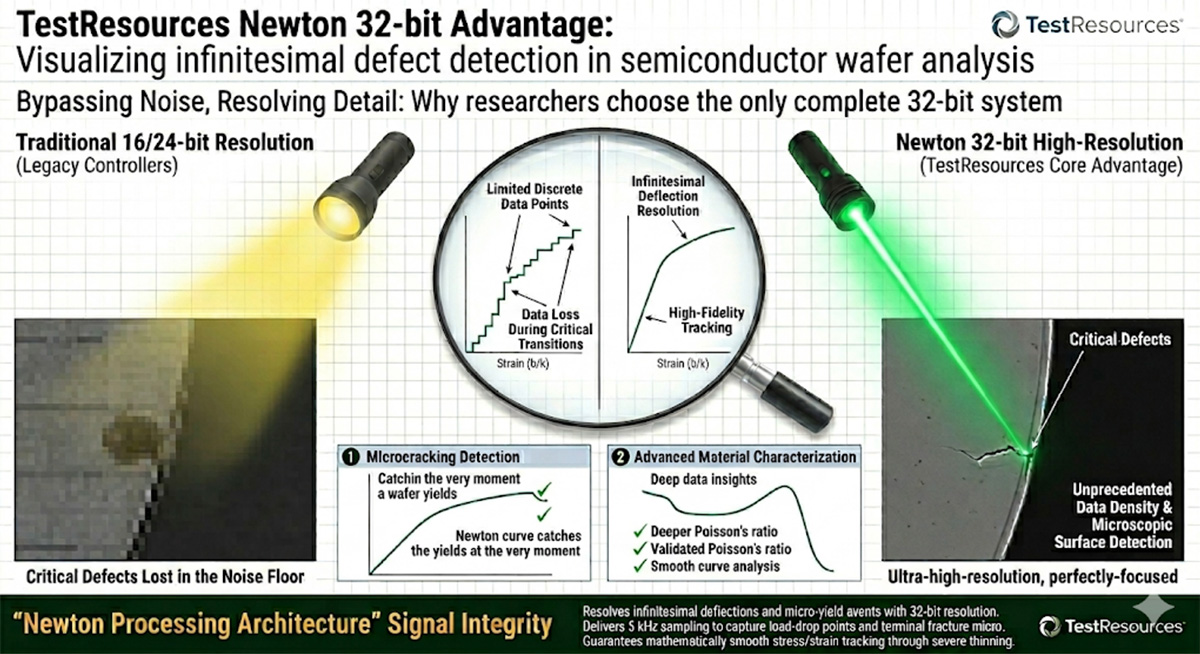
Problem: Resolving the initial linear elastic slope to map the precise tangent or chord shear modulus is highly vulnerable to gear-train back-lash, motor-cogging, and structural fixture compliance, which introduces severe “stair-stepping” artifacts into the stress-strain trace.
Root Cause: Standard 24-bit data acquisition systems lack the discrete resolution needed to capture micro-radial twisting steps under high torque, smoothing over or altering the material’s true proportional limit.
Hardware Solution: MTO mandates a horizontal torsion testing frame layout to ensure easier axial alignment and effortless handling of long specimens. Clamping grips must secure the specimen firmly without crushing the ends. To eliminate drive-train compliance, rotational deformation must be tracked directly on the specimen gauge length using a direct-clamp dual-ring torsiometer or twist gauge. By bypassing the main rotary actuator’s encoder, the software records the pure relative rotational displacement of the two sections to calculate an uncompromised slope fit.
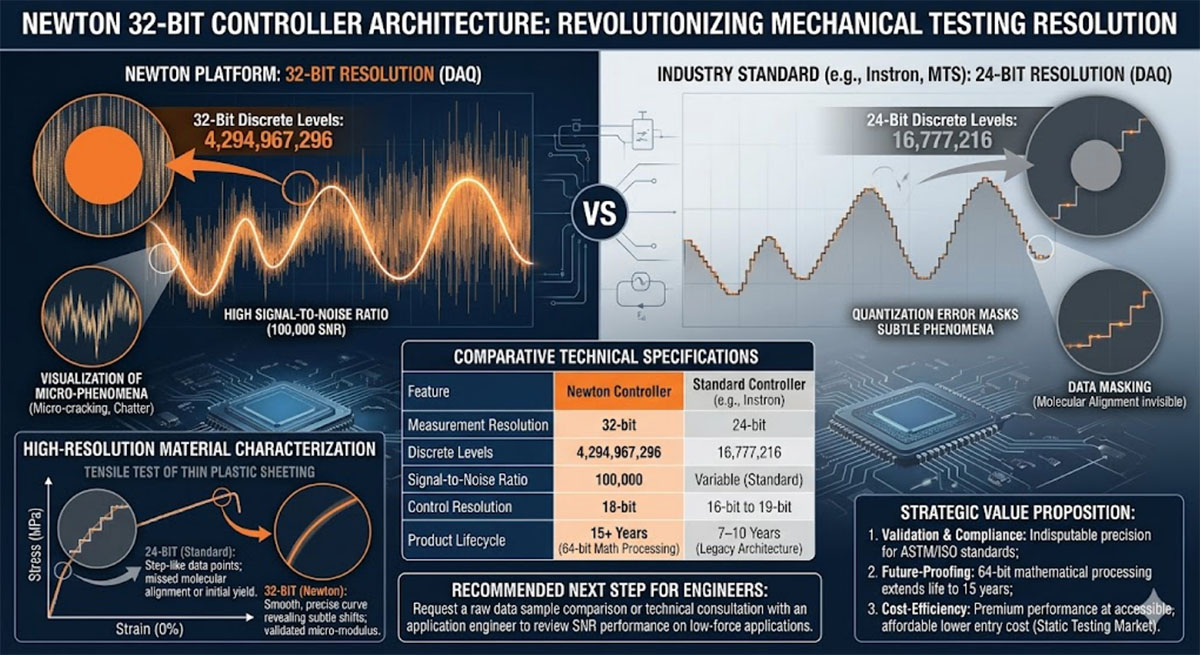
Powered by the Newton processing architecture providing 4.29 billion discrete measurement levels (256x greater resolution than legacy 24-bit processors) to track microscopic angular twist increments flawlessly.
Delivers a High-Resolution 100,000:1 Signal-to-Noise Ratio to isolate fine material rigidity transitions from background electrical chatter and mechanical drive-train vibration.
Commands a rapid 5 kHz internal digital data loop to capture continuous, high-density data point matrixes across the linear elastic region.
Event Detection: Employs real-time tracking software that monitors the torque-to-twist derivative, automatically halting crosshead rotation upon detecting deviations from the linear proportional limit to protect delicate twist gauges.
Calculations: Automatically processes torque, gauge length, polar moment of inertia, and twist angle to calculate the Shear Modulus via the standard elastic equation.
Statistical Output: Automatically generates full batch analytics, computing the statistical Mean, Standard Deviation (SD), and cross-specimen batch consistency for structural verification and FEA modeling validation.
| Load Frame: | TestResources 160T2-100-4 Horizontal Torsion UTM (with Floating Axial Slip Grip) |
| Control Architecture: | Newton Characterization™ |
| Software Module: | N-STD-E143 |
| Grips/Fixtures: | G-STD-E143 (Precision Coaxial Chuck Jaws with Zero-Backlash Mounts) |
| Strain Measurement: | E-STD-E143 (Direct-Contact High-Resolution Dual-Ring Torsionometer / Twist Gauge) |